

Introducing the Cortex Smart Mobility Interface
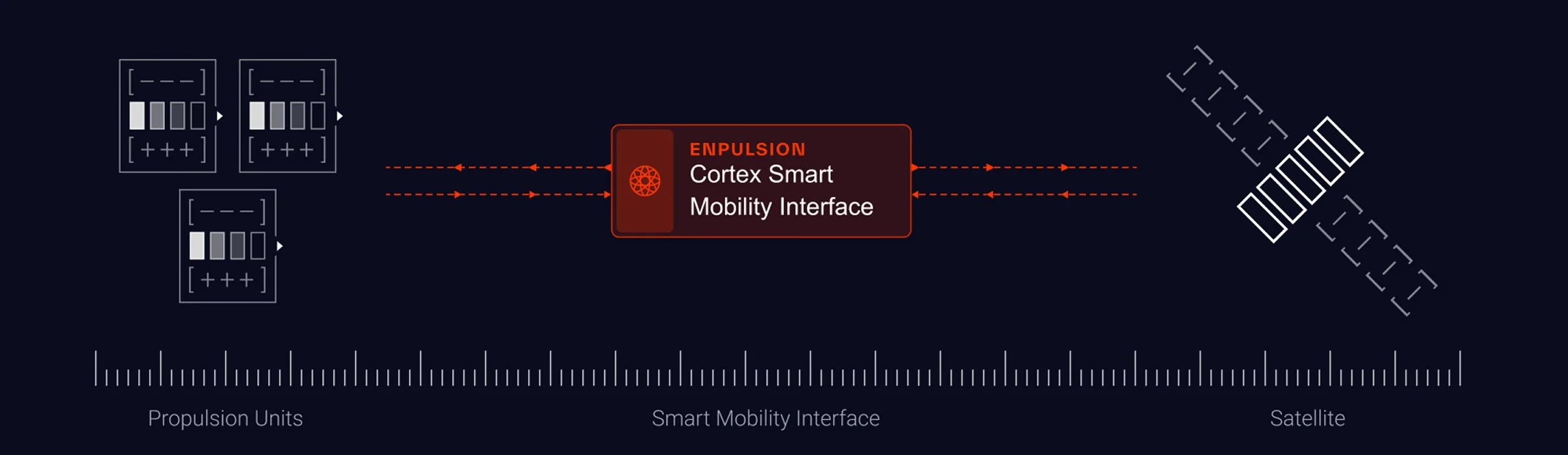
As the core technology for Enpulsion’s next-generation mobility suite, the Cortex Smart Mobility Interface (SMI) enables precise control over multiple thrusters through a single, unified system.
The revolutionary design also eliminates the need to customize communication and power inputs, resulting in streamlined configuration, increased reliability, and a more efficient control experience.

Cortex Smart Mobility Interface Innovative design for seamless integration, simplified control, and optimal performance. |
|
|---|---|
| Input Bus Voltage Range | 12V to 30V |
| Est. Max Power Consumption | 240W (including thrusters) |
| Input Interface | RS422 / RS485 / CAN 2.0 |
| Outside Dimensions | Max 10 x 10 x 5 cm (1) |
| Mass | < 500 g |
| Output Configuration | Max X4 Nano Lark Propulsion Systems |
| Max Interface Speed | CAN 1Mbps RS485/RS422 20Mbps |
| Download Data Sheet |
Talk to an Expert
Talk to an expert to see how the Cortex Smart Mobility Interface can elevate your next mission.

Matthew Randall
Global Director of Business Development and Sales
Features
Seamless Integration. Superior Control.
Scalable Performance
Precise Control
Powered by a 32-bit ARM core processor, the Cortex SMI can issue individual thrust commands or support Attitude Determination and Control (ACDS) via CubeSat Space Protocol (CSP). This enables precise orbital maneuvers through optimized coordination of propulsion systems.
Modular Design
Stackable Architecture
The Cortex Smart Mobility Interface stacks seamlessly with Enpulsion propulsion systems or can be deployed as a standalone unit. It’s built to meet CubeSat standards V14 Rev2.
Versatile Configuration
Adaptable Platform
The Cortex SMI supports up to 2 or 4 Nano Lark Propulsion Systems. With flexible power inputs from 12V to 30V and integrated data communication, the Cortex SMI adapts easily to a range of mission profiles.
Explore the propulsion lineup.
Nexus Osprey
Nexus
Micro Starling
Micro
Nano Lark
Nano